HALのこともっと先生に聞いてみよう
国立病院機構新潟病院の病院長 中島先生にHALについて詳しく聞いてみました。
1. 画期的な神経筋難病治療法 − サイバニクス治療
脊髄性筋萎縮症(SMA)、球脊髄性筋萎縮症(SBMA)、筋萎縮性側索硬化症(ALS)、シャルコー・マリー・トゥース病(CMT)、遠位型ミオパチー、先天性ミオパチー、筋ジストロフィー、封入体筋炎は神経筋難病(以下神経筋8疾患)とされ、わが国では指定難病となっています。上記は運動機能が障害される進行性の難病であり、運動機能に対する治療法開発が待たれていました。
永らくこれらの疾患に対して、効果と安全性を証明した運動療法は未確立でした。反対に、筋ジストロフィー、遠位型ミオパチー、先天性ミオパチー、封入体筋炎などの筋病変を有する疾患に積極的に運動療法を行うと病気を悪化させてしまうことがあると考えられてきました。また、SMA, SBMA, ALS, CMTは運動神経に病変があり、筋自体には病変は無いなのに、なぜ、筋トレーニングが無効で、逆効果になることがあるのかも不明でした。さらに、ごく最近になり、原因治療法の実用化に成功したとされるSMA、SBMA、デュシェンヌ型筋ジストロフィーにおいて、残念ながら、薬物治療のみでは歩行運動機能の改善は難しいことが分かってきました。
山海嘉之教授と臨床研究グループ*1は、上記の神経筋8疾患に対する機能再生治療法を確立するために、神経筋8疾患に使用可能なHAL医療用下肢タイプ(CYBERDYNE社製)の実用開発を行いました。上記の疾患に対して、HALによるサイバニクス治療の検証試験を行い、有効性と安全性を検証し、歩行機能を改善させることを証明しました1)。その結果、世界で初めて神経筋8疾患に対して、HAL医療用下肢タイプは医療機器承認(2015年)2)と健康保険適用(118-4:歩行運動処置、ロボットスーツによるもの)が得られました(2016年)。この様な治療法は今まで存在しなかったため、画期的イノベーションと考えられます。米国FDAにおいても、日本の治験結果等により神経筋8疾患に対して、HAL医療用下肢タイプは医療機器承認を得ることができました(2020年)(https://www.accessdata.fda.gov/scripts/cdrh/devicesatfda/index.cfm?db=pmn&id=K201559)。
2. HAL医療用下肢タイプの動作原理と治療メカニズム
1928年に、ラモニカハールは脊髄を含む中枢神経系の神経細胞や軸索等は一度傷害されると再生できないという動物実験結果を出版し3)、その後、神経可塑性や再生は成人では起きないと考える様になってしまいました4)。一方、Hospら5)が示す様に、人は新生児から老年期まで全年齢において、必要な学習能力があり、老年に脳卒中になり、杖歩行が必要になれば、杖歩行を学習できる様に、全ての年代において、神経可塑性が保たれていることは自明であり、この二つの考え方の差についての議論はなされませんでした。
我々の研究グループは、「装着型サイボーグが、装着者の運動意図を感知し、運動意図に基づき動作しながら、装着者の意図する理想的な運動現象に調節することができ、同時に、装着者は実行した運動現象を感覚(固有感覚)し、それが装着者の意図通りであることで、装着者の報酬系が賦活化されるループが重要と考えました。これを疲労なく、繰り返すことができれば、神経可塑性に基づいて、運動機能再生ができる」と考えました(図1)。これをHALの発明者の山海嘉之教授はinteractive biofeedback(iBF)と名付けています1)6)。
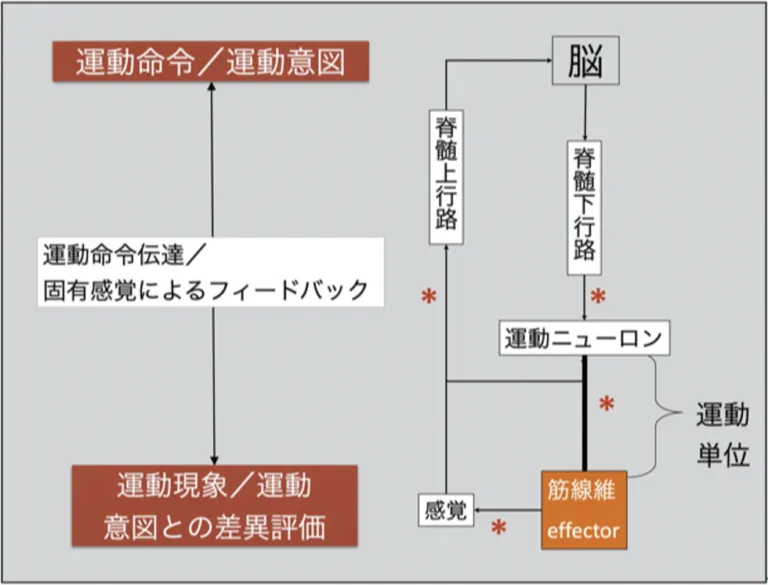
iBFを目的とする機器に必要な性能として「機器を装着した運動中に、運動器の感覚が得られることが重要で、実際の運動現象が自分の意図からどの程度差があるのかを装着者が運動器自体を通して感覚しながら、意図と運動の差分を少なくしつつ、疲れなく繰り返すこと」が重要です。このためHAL医療用下肢タイプにはサイバニックインピーダンス制御(CIC)が備わっています。HALを装着して歩行する際には、足が重いという感覚はなく、自分の脚の状態を自分で感じ取ることができます。同時に、自分の運動意図に直接対応して、HALの電気モーターを駆動させるサイバニック随意制御(CVC)が必要です。脳から下行路で運動ニューロンまで伝達された電気信号は対応する筋線維に伝わり、運動単位電位が発生します。この電位の集合体を皮膚表面で捉え、HALが信号処理することで装着肢に対して、必要なトルクを電気モータにより与えるのです。その際に、装着者は障害のため、十分な運動調整能力がないので、意図する正しい動作に近づけるためのサイバニック自律制御(CAC)が必要です(学習理論の「教師有り学習」に対応)。HAL医療用下肢タイプには理想的な歩行パターンと起立パターンが備わっています。これらのCIC, CVC, CAC(表)による制御がなされるとiBF(図1)が達成できると考えています4)。
表:サイバニック制御とは
| 日本語名 | 英語名 | 略語 |
|---|---|---|
| サイバニックインピーダンス制御 | Cybernic Impedance Control | CIC |
| サイバニック随意制御 | Cybernic Voluntary Control | CVC |
| サイバニック自律制御 | Cybernic Autonomous Control | CAC |
これらのCIC, CVC, CAC(表)による制御がなされるとiBF(図1)が達成できると考えています4)。
サイバニクス治療、すなわち、HAL医療用下肢タイプで歩行運動療法を行う際には1回約20分から30分が適しています。必ず、ホイストなどで完全に転倒予防したうえで使用します。神経筋8疾患により歩行障害のある患者さんは、正しい歩行パターンで20分間歩行しつづけることは通常不可能です。HALを使うことで、電気モータでアシストされ、毎回自分の意図した理想的な歩行パターンに近づけながら、疲労感少なく、にこやかに歩行を繰り返せます。体の状態に合わせて、通常は1回20分~30分を週2~4回継続し、9回程度使用すると、医療従事者も患者自身も明らかな改善効果が認められるようになります。
HAL医療用下肢タイプによる歩行運動療法の副作用に関しては現在までに、重篤な副作用はありません1)。電極やカフが接触した部分への皮膚障害や発赤や、関節痛、筋肉痛などの一般的な運動療法後の症状の報告はありますが、いずれも通常の対処により短期間で症状は改善しています。
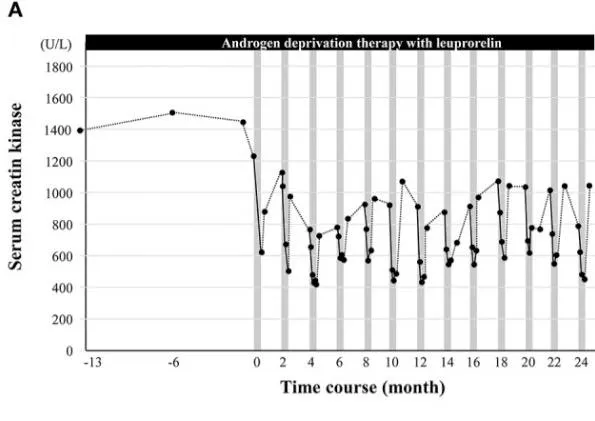
サイバニクス治療では歩行機能が改善するだけでなく、筋に負荷がかかったとき筋から放出される筋酵素である血清CK(クレアチンキナーゼ)値が、サイバニクス治療後にむしろ低下することが分かってきており7)、HALが神経筋疾患自体を保護する作用も徐々に理解されるようになり今後の臨床研究が期待されています。
3. 今後の展望
現時点で、HAL医療用下肢タイプは単独で使用することで、神経筋8疾患患者の歩行機能を改善し、病気の進行による悪化傾向を弱めることができると考えられます。さらに、現在、脊髄性筋萎縮症に対するアンチセンス核酸医薬治療(ヌシネルセン)とHALとの併用療法の複合効果についての観察研究がすすめられています6)7)。また、球脊髄性筋萎縮症においてはリュープロレリンとの複合療法の症例報告でも良い結果が報告されています7)。デュシェンヌ型筋ジストロフィーとALSを含む、神経筋8疾患全体の治療において、今後、原因治療とサイバニクス治療との複合療法が脚光をあびる可能性が高いと考えています6)7)。
現在の神経筋疾患治療の課題は、原因療法によっても歩行障害発症後の歩行機能改善効果が不十分なことですが、HAL医療用下肢タイプにより解決する可能性があると考えています。多くの神経筋8疾患患者さんがHAL医療用下肢タイプを使う事ができるように工夫すると同時に、他の神経疾患にもHAL医療用下肢タイプの有効性を検証する治験をおこなうことができれば良いと考えられます。
- H24〜H26年度 厚生労働省科学研究費補助金 難治性疾患実用化研究事業、「希少性難治性疾患-神経・筋難病疾患の進行抑制治療効果を得るための新たな医療機器、生体電位等で随意コントロールされた下肢装型補助ロボット(HAL-HN01)に関する医師主導治験の実施研究」 研究代表者 中島孝

- H27〜H30年度 日本医療研究開発機構研究費 難治性疾患実用化研究事業「希少難治性脳・脊髄疾患の歩行障害に対する生体電位駆動型下肢装着型補助ロボット(HAL-HN01)を用いた新たな治療実用化のための多施設共同医師主導治験の実施研究」 研究開発代表者 中島孝
解説:中島孝
国立病院機構新潟病院 病院長
- Nakajima Takashi, Sankai Yoshiyuki, Takata Shinjiro, 他: Cybernic treatment with wearable cyborg Hybrid Assistive Limb (HAL) improves ambulatory function in patients with slowly progressive rare neuromuscular diseases: a multicentre, randomised, controlled crossover trial for efficacy and safety (NCY-3001). Orphanet Journal of Rare Diseases 16: 304, 2021.Retrieved from https://doi.org/10.1186/s13023-021-01928-9
- HAL医療用下肢タイプ添付文書, 2016 https://www.cyberdyne.jp/products/pdf/HT010910A-U01_R1.pdf.
- Ramón y Cajal Santiago: Cajal’s degeneration and regeneration of the nervous system Facsimile of the 1928, Hafner Publishing Company, London, New York, 1991.Retrieved from Publisher description http://www.loc.gov/catdir/enhancements/fy0604/91003890-d.html
- 中島 孝: VIII.神経・筋疾患に対するサイバニクス治療. 日本内科学会雑誌 107: 1507-1513, 2018. Retrieved from https://www.jstage.jst.go.jp/article/naika/107/8/107_1507/_pdf
- Hosp J. A., Luft A. R.: Cortical plasticity during motor learning and recovery after ischemic stroke. Neural Plast 2011: 871296, 2011. Retrieved from https://www.ncbi.nlm.nih.gov/pubmed/22135758
- 中島 孝: Special Articles 総説 装着型サイボーグHAL. MD Frontier 2: 19-25, 2022. Retrieved from http://search.jamas.or.jp/link/ui/2022167416
- Nakatsuji H., Ikeda T., Hashizume A., Katsuno M., Sobue G., Nakajima T.: The Combined Efficacy of a Two-Year Period of Cybernic Treatment With a Wearable Cyborg Hybrid-Assistive Limb and Leuprorelin Therapy in a Patient With Spinal and Bulbar Muscular Atrophy: A Case Report. Front Neurol 13: 905613, 2022.Retrieved from https://www.ncbi.nlm.nih.gov/pubmed/35812096
- 中島 孝: ロボティクス,特にサイバニクスを用いた神経筋疾患リハビリテーション. The Japanese Journal of Rehabilitation Medicine 57: 409-414, 2020.Retrieved from https://www.jstage.jst.go.jp/article/jjrmc/57/5/57_57.409/_pdf